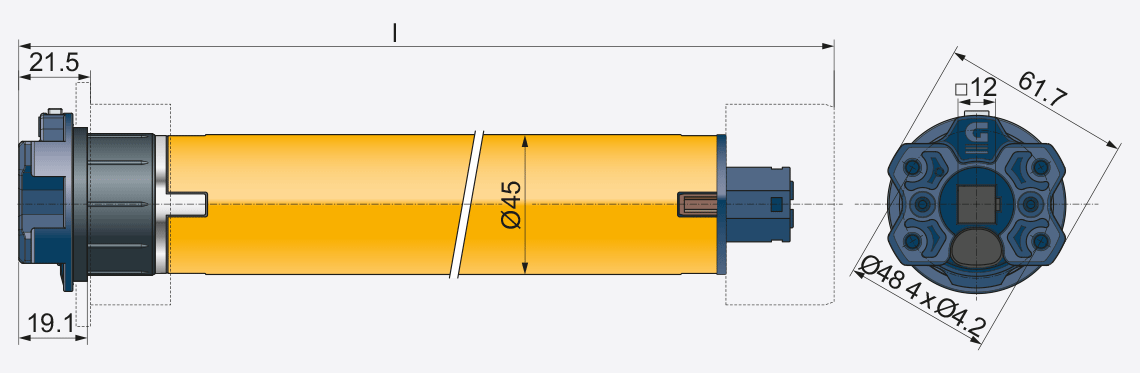
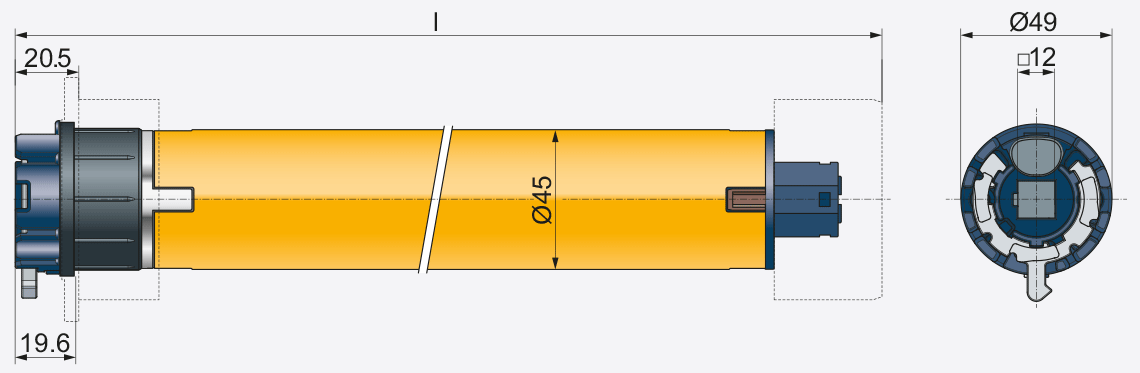
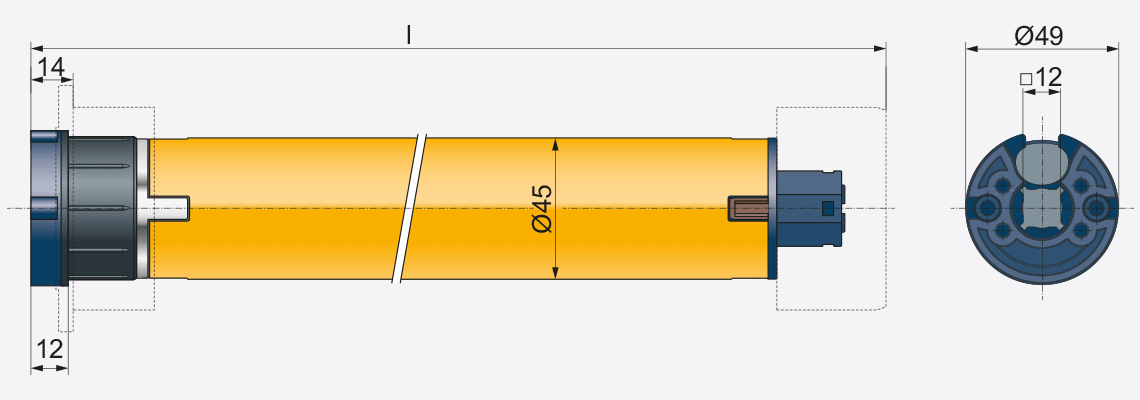
Motor tubular electrónico Ø 45 mm


Si el sistema detecta un obstáculo, el motor desplaza la persiana en la dirección opuesta en una cantidad determinada. Tras otros dos intentos fallidos, el sistema se desplaza a su posición de seguridad (posición final superior). Esto se aplica tanto en dirección ARRIBA como ABAJO.

La inteligencia motriz integrada reconoce los obstáculos al extenderse y protege así el sistema.

El motor reconoce el estado del sistema y puede detectar cambios en el comportamiento del enrollamiento. Si la persiana se mueve demasiado despacio en dirección ABAJO y el carril extremo amenaza con inclinarse, el motor se detiene automáticamente para proteger el sistema y la persiana.

La inteligencia del motor integrado reconoce los obstáculos al replegarse y protege así el sistema.

Cada 50 ciclos se realiza un recorrido de referencia para comprobar si las posiciones finales son correctas. Para ello, la persiana se desplaza hacia arriba hasta que el motor se desconecta al par. De este modo se comprueban las posiciones finales y, si es necesario, se corrigen.

Detección independiente de las posiciones finales sin perder tiempo en trabajos de ajuste durante el proceso de instalación. Se completa con un solo movimiento hacia arriba y hacia abajo. Ajuste rápido y preciso de las posiciones finales.

La persiana se detiene antes de alcanzar la posición final superior para proteger los materiales.

Esta función evita que se aplasten o dañen los dedos u otros objetos.

El motor reconoce que la persiana está congelada en el alféizar de la ventana y detiene el proceso de enrollado.

La detección de obstáculos puede diferenciar entre un obstáculo y una ráfaga de viento. En caso de ráfaga de viento en dirección ABIERTA, la persiana se desplaza con seguridad a la posición final superior, lo que protege el sistema y evita daños en la persiana.
Estás viendo un contenido de marcador de posición de Elfsight. Para acceder al contenido real, haz clic en el siguiente botón. Ten en cuenta que al hacerlo compartirás datos con terceros proveedores.
Más información{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}