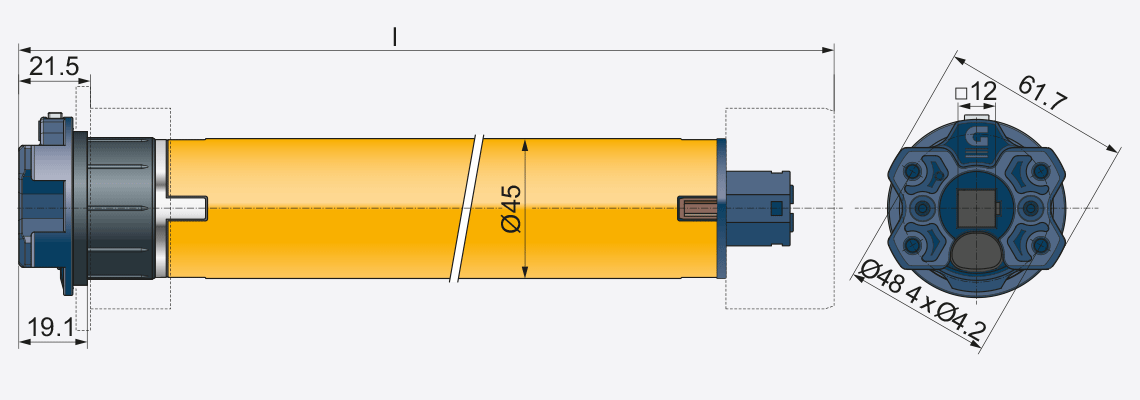
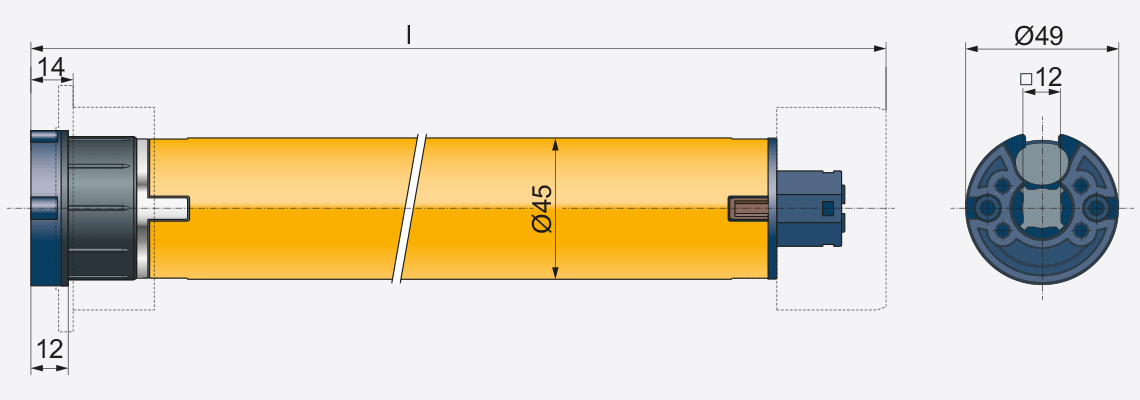
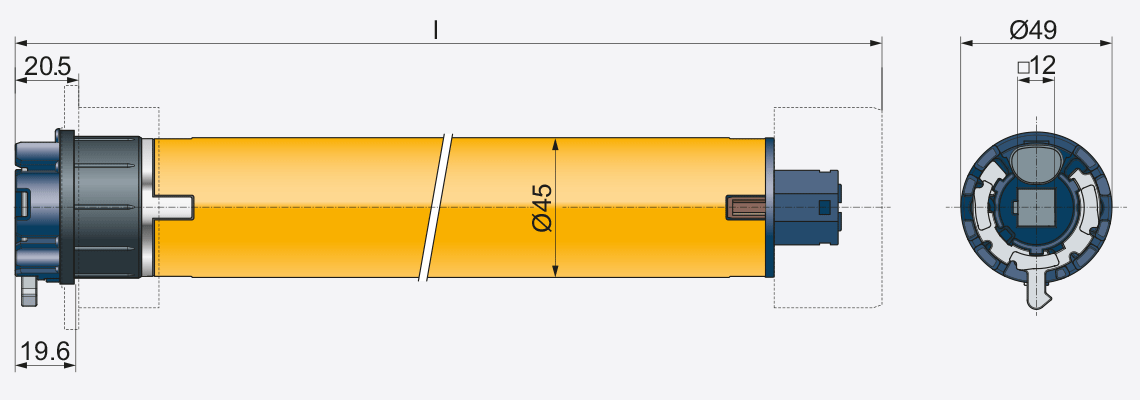
Moteur tubulaire électronique Ø 45 mm


Si l’installation détecte un obstacle, le moteur déplace le tablier d’une valeur définie dans la direction opposée. Après deux autres tentatives infructueuses, l’installation se déplace vers sa position de sécurité (position de fin de course supérieure). Ceci est valable dans le sens de la montée comme dans le sens de la descente.

L’intelligence intégrée du moteur détecte les obstacles à l’entrée et protège ainsi l’installation.

L’intelligence intégrée du moteur détecte les obstacles lors de la sortie et protège ainsi l’installation.

Le moteur reconnaît l’état de l’installation et peut détecter un comportement d’enroulement modifié. Si le tablier se déplace trop lentement dans le sens AB et que la lame finale menace de se coincer, le moteur s’arrête automatiquement afin de protéger l’installation et le tablier.

Détection autonome des positions de fin de course, sans avoir à effectuer de longs réglages lors du processus d’installation. Effectué en une seule montée et descente. Réglage rapide et précis des fins de course.

Le tablier s’arrête avant d’atteindre la position de fin de course supérieure afin de préserver les matériaux.

Cette fonction évite de pincer ou d’endommager les doigts ou d’autres objets.

Le moteur détecte que le tablier est gelé sur l’appui de fenêtre et arrête l’enroulement.

Tous les 50 cycles, un déplacement de référence est effectué afin de vérifier si les positions finales sont correctes. Pour ce faire, le tablier est déplacé vers le haut jusqu’à ce que le moteur s’arrête au couple. Les positions finales sont ainsi vérifiées et, si nécessaire, corrigées.

La détection d’obstacles peut faire la différence entre un obstacle et une rafale de vent. En cas de rafale de vent dans le sens OUVERT, le tablier se déplace en toute sécurité vers la position finale supérieure, ce qui protège l’installation et évite d’endommager le tablier.
Vous êtes actuellement en train de consulter le contenu d'un espace réservé de Elfsight. Pour accéder au contenu réel, cliquez sur le bouton ci-dessous. Veuillez noter que ce faisant, des données seront partagées avec des providers tiers.
Plus d'informations{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}